戴天虹,顾昕岑,刘学哲,胡雪晶
(东北林业大学机电工程学院,哈尔滨 150040)
摘 要:在经典检测算子中,针对单板灰度图像的缺陷检测存在缺陷边缘检测不清晰甚至出现伪边缘的问题,提出了一种 Otsu改进算法与数学形态学相结合的单板缺陷检测算法.在 HSI彩色空间中,对利用数学形态学滤波后的H、S、I分量采用本文算法进行分别处理,并将三分量的检测结果进行叠加.结果表明,该算法能够准确检测出单板的一个或多个缺陷边缘.与经典边缘检测算子的检测结果对比可知,该算法无论对于缺陷的定位还是边缘的提取均优于其他方法.
关 键 词:数学形态学;多结构元素;灰度图像;缺陷检测;单板缺陷;边缘提取;缺陷定位;彩色空间
当今生态环境遭到严重破坏,导致地质灾害频发.国家逐渐意识到生态环境保护的重要性,并将环境保护作为国家未来发展的奠基石.要想使得环境得到有效改善,对于森林的保护无疑是重中之重.国家有关部门基于对森林的保护出台了相关法律条例,大肆砍伐天然木材已然是一种违法行为 [1].但是人们对木材制品的需求量并没有减少,因此,用人造板材来代替实木无疑是解决这一问题的有效方法.
人造板材有很多种,其中表层粘贴单板的人造板材与实木板材特性接近且视觉效果良好,受到人们的广泛欢迎.要想制造高品质人造板材,单板质量必须过硬,因此,对单板进行再加工的过程中,提取单板缺陷的成功与否是加工产品好坏的重要前提.目前,常见的单板缺陷有木材本身的虫眼、死结和活结等,也有经过旋切或其他加工过程中产生的缺陷.对于单板缺陷的检测,我国现有的大部分方法仍是采用效率低下的人工进行筛选.在对单板进行缺陷检测的方法中,大多数是基于灰度图像或彩色图像利用单一方法进行缺陷检测的.这样处理得到的结果不仅具有局限性而且不能准确保留缺陷的细节信息.本文采用改进的Otsu与形态学两种不同方法,实现了对H、S、I三分量的缺陷检测,并将三分量的缺陷检测结果进行叠加,最后通过骨架提取的方法提取出缺陷边缘 [2].本文方法能够尽量保留缺陷的细节信息,并且对于多缺陷的单板也有较好的检测效果.
1.1 灰度数学形态学
灰度形态学是对二值形态学进行延伸及发展得到的,其理论本身与讨论域的维数无关.
1.1.1 灰度图像的膨胀与腐蚀
设f(x,y)为原始输入图像,g(x,y)为作用于输入图像的结构元素,两函数值分别代表其在(x,y)处的灰度值,则f(x,y)被g(x,y)膨胀可记作f⊕g,具体定义为
式中:D f、D g分别表示 f(x,y)与g(x,y)的定义域;(u,v)为函数f自变量方向的位移量.
腐蚀与膨胀是一对对偶运算,则用g(x,y)对f(x,y)进行腐蚀可记作 fΘg,具体定义为
由上式可以发现,膨胀运算是求取所选取的图像值与结构元素值之和的极大值.腐蚀运算是求取所选取的图像值与结构元素值之差的极小值.
1.1.2 灰度图像的开运算与闭运算
f(x,y)被 g(x,y)做开运算,其表达式为
f(x,y)被 g(x,y)做闭运算,其表达式为
1.2 Otsu算法结合类内聚性与多阈值的改进算法
传统的Otsu算法采用基于类间方差最大原则,在算法中设定一个阈值,从而将图像分为目标与背景两类.由于单板有多种缺陷,某些缺陷边界与背景的灰度值可能会很接近,而只采用一个阈值很难达到精确检测、分辨缺陷,故本文采用多阈值的Otsu算法,并结合类的内聚性概念,进而达到阈值的精确选取 [3],具体定义如下所示.
假定图像中有m个待区分类,m-1个阈值分别为t 1,t 2,…,t n,…,t m-1,则m个区分类分别为C 1={0,1,…,t 1},…,C n={t n+1,t n+2,…,t n+1},…,C m={t m+1,t m+2,…,L-1}.类间方差可定义为

本文令
式中:μ 0,…,μ n,…,μ m-1为各类的平均灰度值;ω 0,…,ω n,…,ω m-1为 m个类可能出现的概率;μ为图像总平均灰度级;N为图像中整体像素个数和;P i为第i级出现的概率;N i为图像中第i灰度级像素个数和.
由上述算法可知,尽管阈值的个数是决定图像分类的关键,但并不能在对图像进行分类之前确定出阈值的个数.如果仅考虑类间分离性而忽略类内内聚性则会导致阈值选取的误判 [4].本文通过类间分散度和类内分散度联合确定阈值的个数,采用类间分离因子S F与类内分离因子 B F进行检测,其定义为
式中:V
T为图像的总方差,即
![]() d
0,…,d
n,…,d
m-1为图像的类内分散度.
d
0,…,d
n,…,d
m-1为图像的类内分散度.
S F的值越大,则表示类之间的分离性越好,而
当S F值接近于1时,σ BC取得最大值,阈值与类的个数可以待确定,从而可以求取 L F的最大值,并且可得到最佳阈值个数.
1.3 HSI与RGB相互转换
HSI模型较RGB模型能够更好地贴近人类对事物的观察认知,因此,本文在 HSI模型中实现对单板的缺陷检测,并最后转化为RGB模型.考虑到分辨率及逆向还原性,本文选择几何推导法来实现两个模型之间的相互转换.
RGB转化为HSI,其表达式为
式中

HSI转化为 RGB,其表达式为:
当
![]() 时,
时,
当
![]() )时,
)时,

当
![]() )时,
)时,
本文基于HSI彩色模型实现了对单板缺陷的检测,主要检测流程 [5-6]如图1所示.图1中,B 1,B 2,…,B q为结构元素;K 1,K 2,…,K q为采用其相应的结构元素通过灰度形态学边缘检测公式检测后得到的缺陷图像;E H为H分量采用改进Otsu算法得到的缺陷分割图像;E S、E I分别为采用上述选用的结构元素通过灰度形态学得到的缺陷图像以相应的权重叠加而形成的S与I分量的缺陷图像.经实验论证,在利用数学形态学与改进的Otsu算法实现对三分量同时进行缺陷检测的多个方法中,单板彩色图像缺陷检测方法的效果最佳.
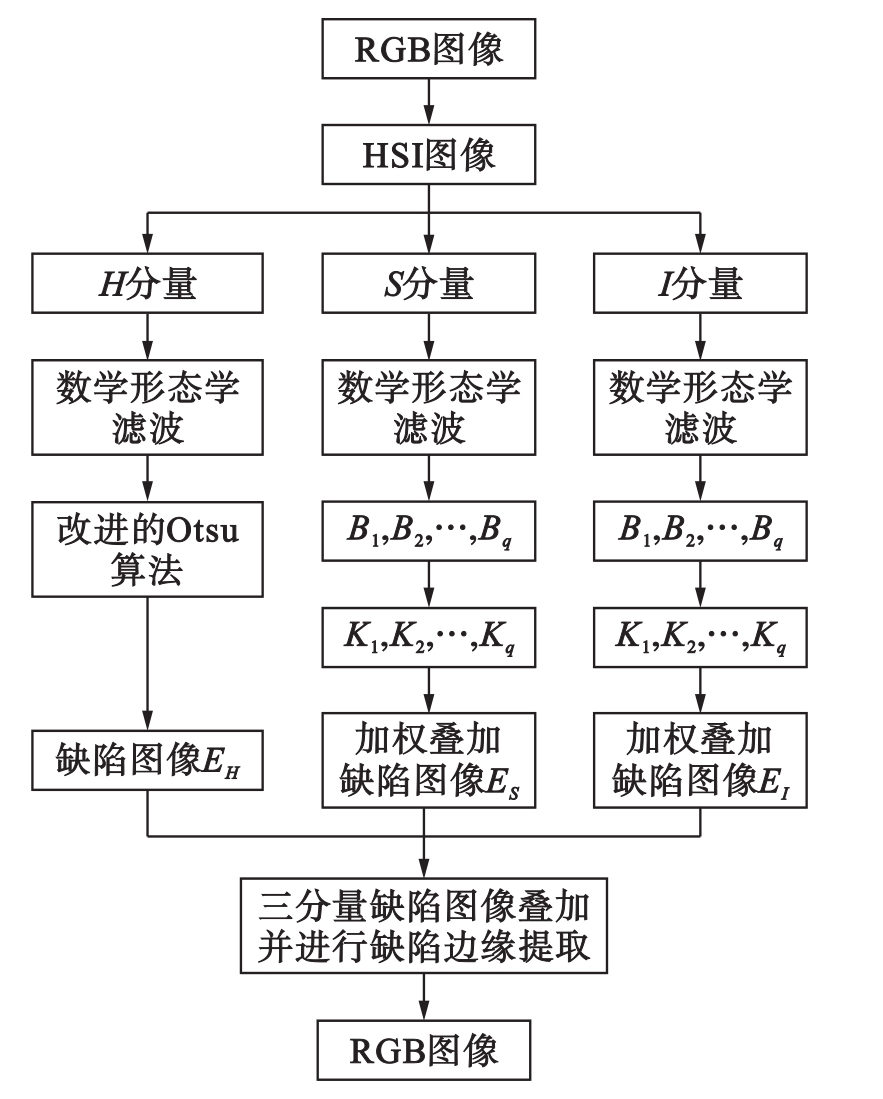
图1 单板图像缺陷提取步骤
Fig.1 Defect extraction step for images of veneer
2.1 数学形态学滤波
数学形态学是一种非线性滤波方法,利用数学形态学进行滤波可以避免线性滤波方法在滤波过程中的缺陷.通过膨胀、腐蚀、开闭运算的适当组合实现了对三分量的滤波,进行初步梯度检测为之后的缺陷提取奠定了基础.滤波之后三分量图像的表达式为
式中,B j为结构元素.经实验证明,当权值分别为0.3与1.7时滤波效果最佳.
2.2 结构元素的选取
结构元素的选取是否合适是数学形态学能否对图像进行较好处理的关键.若结构元素选取过小,会使图像中的噪声去除不完全或无法去除;若结构元素选取过大,会使图像中细节检测不完全.根据结构元素的大小和差异可以检测出在不同尺寸和方向上的图像边缘.本文选取全方位、多尺度、多结构元素对单板缺陷进行检测.
2.2.1 全方位结构元素
由于单板缺陷的图像信息在很多方向上都存在,仅依靠单一方向的结构元素无法得到单板缺陷的完整信息.全方位多结构元囊括了在方形窗口内的所有线条走向,实现了对方形滤波窗口全方位的划分,该方法能够尽可能地将图像的细节信息保留完整 [7],其具体方法如下.
在(2Z+1)×(2Z+1)窗口,定义该方窗为全方位结构元(子窗),即
式中,α为单位旋转角.本文选取 Z=4,在9×9窗口中,全方位结构元素对应的角度 θ为0°、11.25°、22.5°、…、168.75°.
图2给出了当θ为11.25°、22.5°、135°、146.5°、157.5°时的结构元素示意图,由于文章篇幅有限,本文不一一赘述.
图2 部分全方位结构元素示意图
Fig.2 Schematic partial omni-directional structural elements
2.2.2 多尺度多结构元的选取
基于同一结构元素不同尺度与不同结构元素在同一尺度或不同尺度会对同一单板缺陷有着不同检测效果 [8],本文选择正方形、菱形、圆形与边缘型结构元,分别有3×3与5×5两种不同尺度.
2.3 灰度形态学边缘检测
基于灰度形态学的单板缺陷边缘检测实际上是检测图像中某一点的梯度最大值.常见灰度形态学梯度算子有膨胀型、腐蚀型以及膨胀腐蚀型 [9].本文结合高低帽变换及开闭运算的适当组合,提出了全新的五种边缘检测算子,实现了对单板缺陷边缘的检测,五种算子的表达式为
式中:G 1h,G 2h,…,G 5h为边缘检测算子,其中,h的取值为1~q;B h为全方位、多尺度、多结构元的结构元素.每个结构元素的缺陷检测图像是由其相应的边缘检测算子之和取平均得到的,其表达式为
S与I分量的缺陷检测图像是由在其分量中的每个结构元素的缺陷检测图像附以不同的权重加权取平均得到的,其表达式为
式中,ω h为在不同分量不同结构元素下的权重.对于不同的单板缺陷,不同尺度、方向、结构的元素,其ω h取值会有所不同 [10].本文引入均方误差,其反映的是恢复图像偏离原始图像的程度,均方误差值越小代表恢复图像偏离原始图像越小.用均方误差来确定 ω h的值,可实现对各个结构元的最佳配比,ω h的表达式为
式中:E、F分别为图像矩阵中像素的行数和列数,
其中
![]() 为恢复图像.
为恢复图像.
由式(22)可知,恢复图像偏离原始图像越小,则该恢复图像所赋予的权值越大.将三分量缺陷检测图像进行叠加可得到最终单板缺陷图像T,即
2.4 边缘检测
边缘检测的目的是勾勒出图像中亮度变化明显的一些点.骨架化原理是不改变图像的本质结构,将图像的所有对象简化为线条.本文采用数学形态学中的骨架化原理将检测出的单板缺陷进行边缘提取 [11].
本文将三分量缺陷检测图像叠加得到缺陷图像,经过骨架化实现对缺陷边缘的提取.本文从死结、活结、虫眼的缺陷图像样本库中各选取50张作为测试样本,并分别利用本文算法与经典边缘检测算子 Canny、Robert、Prewitt对测试样本进行检测,对比的检测结果表明本文算法的检测结果优势明显.图3~5分别为随机选取的一组死结、活结、虫眼的缺陷检测对比图,其中,各子图分别为每个缺陷的原图,Canny算法、Prewitt算法、Robert算法对缺陷检测的结果,以及利用本文算法对缺陷检测的结果及缺陷边缘提取.
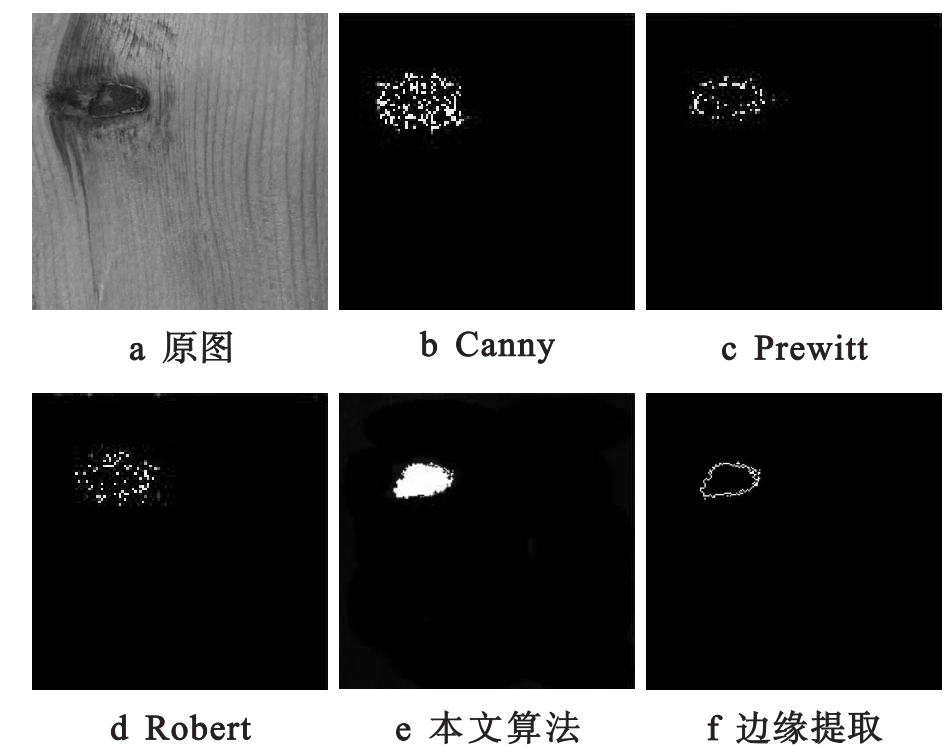
图3 死结缺陷检测对比结果
Fig.3 Comparison in test results of knot defect
本文在HSI模型中,对H分量采用Otsu改进算法进行单板缺陷提取,对S、I分量采用结构元素进行形态学缺陷检测,并以改进的权值确定机制将S、I分量中各个结构元素以加权取均值的方式进行叠加,最后将三分量的缺陷检测图像进行叠加,通过缺陷骨架化进行缺陷边缘检测.实验结果表明,本文算法明显优于传统的边缘检测算子算法,不仅对单个单板缺陷有较好的检测效果,对多个缺陷的单板也能准确地确定缺陷的形态与位置.
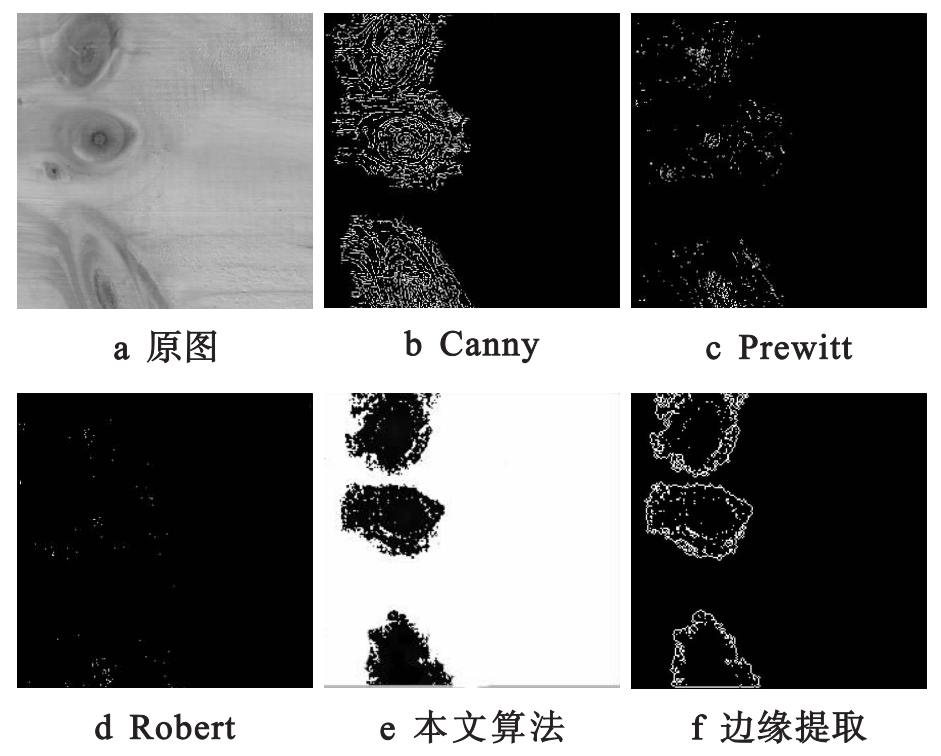
图4 活结缺陷检测对比结果
Fig.4 Com parison in test results of live knot defect
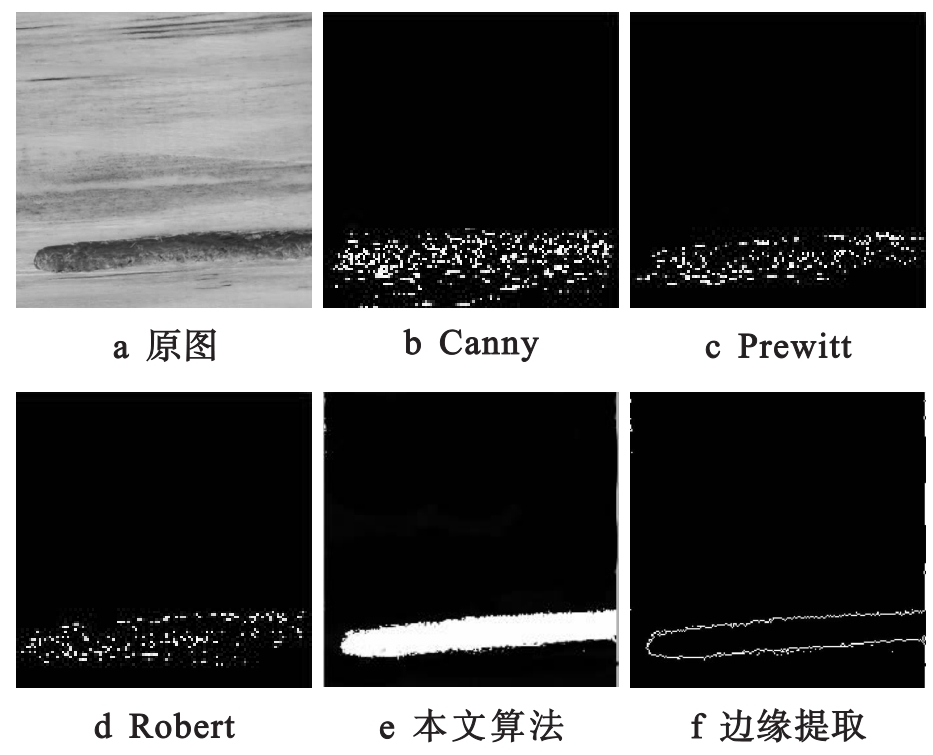
图5 虫眼缺陷检测对比结果
Fig.5 Comparison in test results of wormhole defect
参考文献(References):
[1]吴依阳.我国森林资源保护立法问题研究[D].长春:吉林大学,2012.(WU Yi-yang.Research on the legislative issues of forest resources protection in China[D].Changchun:Jilin University,2012.)
[2]陈向东,李平.基于色彩特征的CAMSHIFT视频图像汽车流量检测[J].沈阳工业大学学报,2015,37(2):183-188.(CHEN Xiang-dong,LI Ping.Vehicle flow detection with CAMSHIFT video images based on color feature[J].Journal of Shenyang University of Technology,2015,37(2):183-188.)
[3]张建波.基于Otsu的红外图像阈值分割研究[D].湘潭:湘潭大学,2014.(ZHANG Jian-bo.Infrared image threshold segmentation research based on Otsu[D].Xiangtan:Xiangtan University,2014.)
[4]王磊,段会川.结合类的内聚性的Otsu阈值计算方法研究[J].信息技术与信息化,2008(4):55-56.(WANG Lei,DUAN Hui-chuan.A novel thresholding approach devised by combining class cohesiveness into Otsu method[J].Information Technology and Informatization,2008(4):55-56.)
[5]解朦.基于形态学的单板彩色图像缺陷检测[D].哈尔滨:东北林业大学,2014.(XIEMeng.Defect detection on colorful image of veneer based on morphology[D].Harbin:Northeast Forestry University,2014.)
[6]李雪林.基于数学形态学的彩色图像边缘检测算法研究[D].武汉:武汉理工大学,2014.(LIXue-lin.Research on edge detection of color images based on mathematical morphology[D].Wuhan:Wuhan University of Technology,2014.)
[7]解朦,戴天虹,李琳.基于HSI空间的形态学单板缺陷检测[J].森林工程,2014,30(2):65-67.(XIE Meng,DAI Tian-hong,LI Lin.Veneer defects detection based on mathematical morphology in space HSI[J].Forest Engineering,2014,30(2):65-67.)
[8]何宇.基于数学形态学的图像分割及其在医学图像中的应用[D].武汉:中南民族大学,2013.(HE Yu.Mathmatical morphological skeleton and study of its extraction and reconstruction[D].Wuhan:South-Central University for Nationalities,2013.)
[9]邱筱斐.基于数学形态学的木材缺陷分割技术的研究[D].哈尔滨:东北林业大学,2012.(QIU Xiao-fei.Segmentation technology of wood defects based on mathematical morphology[D].Harbin:Northeast Forestry University,2012.)
[10]熊睿,马国红,聂军,等.基于多结构元素的形态学焊缝起始点识别 [J].热加工工艺,2014,43(21):158-160.(XIONG Rui,MA GUO-hong,NIE Jun,et al.Identification of initial welding position in morphology by using multi-structure element[J].Hot Working Technology,2014,43(21):158-160.)
[11]张慧杰,刘亚鑫,马志强,等.一种基于形态学编码的地形骨架特征提取方法[J].计算机研究与发展,2015,52(6):1409-1423.(ZHANG Hui-jie,LIU Ya-xin,MA Zhi-qiang,etal.A terrain skeleton feature extraction method based on morphological encoding[J].Journal of Computer Research and Development,2015,52(6):1409-1423.)
(责任编辑:钟 媛 英文审校:尹淑英)
姚登凯 1,孙千锐 1,吴奇科 1,徐天舒 2
(1.空军工程大学 空管领航学院,西安 710051;2.66137部队 中部战区空域管理队,北京 100061)
摘 要:为了实现对低空空域运行航空器的有效跟踪,进而保障低空空域运行安全,将一次雷达与无源雷达进行组合,运用MSPDAF算法进行两种雷达协同监视的信息融合,并将回波源于目标的概率应用于目标状态估计中.仿真结果表明,该算法相比单独一种雷达的跟踪算法具有更好的融合精度,能够在电磁环境复杂的低空空域中有效地进行目标跟踪,从而可以应用到低空空域航空器的监视,为低空运行提供更高的安全保障.
关 键 词:低空空域;监视;一次雷达;无源雷达;信息融合;MSPDAF算法;目标跟踪;MATLAB仿真
中图分类号:TP 301.6 文献标志码:A 文章编号:1000-1646(2016)06-0680-06
doi:10.7688/j.issn.1000-1646.2016.06.15
Application of MSPDAF algorithm in information fusion for low altitude airspace surveillance
YAO Deng-kai
1,SUN Qian-rui
1,WU Qi-ke
1,XU Tian-shu
2
(1.Air Traffic Control and Navigation College,Air Force Engineering University,Xi’an 710051,China;2.Central Theater Airspace Management Team,66137 Forces,Beijing 100061,China)
Abstract:In order to achieve the effective tracking of aircraft and guarantee the operation safety in low altitude airspace,the primary and passive radars were combined,and the information fusion for the cooperative monitoring of two kinds of radars was performed with MSPDAF algorithm.In addition,the probability that the echo comes from the target was applied into the target state estimation.The simulation results show that the proposed algorithm can achieve better fusion accuracy and interference immunity than the algorithm with only one kind of radar,and has the capability of effectively tracking the target in the low altitude airspace with complex electromagnetic environment.The proposed algorithm can be used for the surveillance of aircraft in the low altitude airspace and provide higher safety assurance for the low altitude airspace operation.
Key words:low altitude airspace;surveillance;primary radar;passive radar;information fusion;MSPDAF algorithm;target tracking;MATLAB simulation
低空航空器具有机型小、速度慢、机动性强、时效性较高等特点 [1],而低空空域的高度范围较低,对低空航空器的监视极易受到地面环境的影响.对航空器位置、速度等信息的获取即为“监视”,既是对航空器飞行安全的保障,也是对地面重要目标以及人们生存空间安全的守护.由于低空空域的这些特点,传统的针对中高空空域的监视手段无法实现对低空空域的有效监视,严重制约其使用和发展.因此,对低空空域监视方法的研究有助于保障低空空域运行安全,促进低空空域
收稿日期:2016-07-05.
基金项目:国家空管科研基金资助项目(GKG20142001).
作者简介:姚登凯(1966-),男,安徽阜阳人,教授,硕士,主要从事航空管制、空域规划与管理、无人机空管等方面的研究.
* 本文已于2016-11-07 12∶30在中国知网优先数字出版.网络出版地址:http:∥www.cnki.net/kcms/detail/21.1189.T. 20161107.1230.014.htm l
进一步开放,有助于通用航空的发展.
目前,低空空域监视的主要手段包括广播式自动相关监视(ADS-B)、一次雷达、无源探测雷达和多源综合监视等 [2].ADS-B具有较高的完整性和精确度,但其使用要求航空器配备相应机载设备,而此类设备成本较高,推行障碍较大,难以在短时间内覆盖所有低空航空器,故使得其无法成为主流的低空空域跟踪监视手段;一次雷达既能测量目标的位置信息,也能测量目标的角度信息,测量精度高,但是其测量距离有限并且易受干扰,由于低空空域高度较低,航空器飞行区域内常存在高山,对一次雷达的目标探测将产生巨大影响;无源雷达可以测量目标的角度信息,但是不能直接测量位置信息,探测距离远,不需自身发送电磁波信号,只需利用目标辐射的电磁信号,具有反干扰、反隐形等诸多优势 [3].将有源、无源雷达所得信息进行融合的协同监视可以在充分发挥二者自身优势的同时,互相弥补不足,提高低空空域监视能力.而这种协同监视手段不需要航空器进行协作,可以对非合作型目标进行监视,从而更好地保障空域安全.
我国对于低空空域监视的研究正处于起步阶段,文献[4]研究集中在 ADS-B的概述等方面,缺乏针对低空空域特性的技术研究;文献[5]应用一次雷达监视技术,采用平面位置指示算法和交互式多模型方法对低空目标进行跟踪,但仍局限于单一的一次雷达监视方式,无法克服对于低空空域难以完全覆盖的弊端;文献[6]则利用最临近算法对组网雷达进行信息融合,但多次融合可能增加信息处理时间.本文根据一次雷达和无源雷达各自工作的特点,采用多传感器概率数据关联算法(MSPDAF)将两种雷达所探测的信息进行融合,该算法的特点决定其能够在电磁环境复杂的低空空域中进行目标跟踪,且仿真实验证明其具有较高的目标测量精度,从而能够对低空空域航空器进行更有效地跟踪监视,获取航空器位置信息,以更好保障低空运行安全.
多传感器信息融合技术将来自多传感器的数据和相关数据库中的信息进行组合,从而得到更高的测量精度 [7].异类传感器系统的数据融合技术与同类传感器系统的数据融合技术相比的优势在于:数据冗余度与互补性增强,融合系统的可靠性能够得到改善 [8].
融合的功能模型可分为5级:层次依次为检测级融合、位置级融合、属性级融合、态势评估和威胁估计 [9].前 3个层次的数据融合适合于任意的多传感器数据融合系统,后 2个层次主要应用于情报指挥控制与通讯系统中的数据融合.
位置级融合利用多个传感器资源,通过对传感器及其观测信息的合理支配和利用,把传感器在空域、时域和频域上的信息依据一定准则进行组合优化,得到更稳健和精确的目标状态信息 [10],其结构模型主要分为4种,即集中式、分布式、混合式和多级式.本研究中采用位置级融合中的集中式融合,在其系统结构中,将一次雷达和无源雷达所录取的检测报告直接传送至融合中心,在此处对数据进行对准和互联,对航迹进行滤波、预测以及跟踪等处理,其过程如图1所示.这种形式的最大优点是信息损失最小,一般点迹与点迹、点迹与航迹的融合采用这种融合形式.
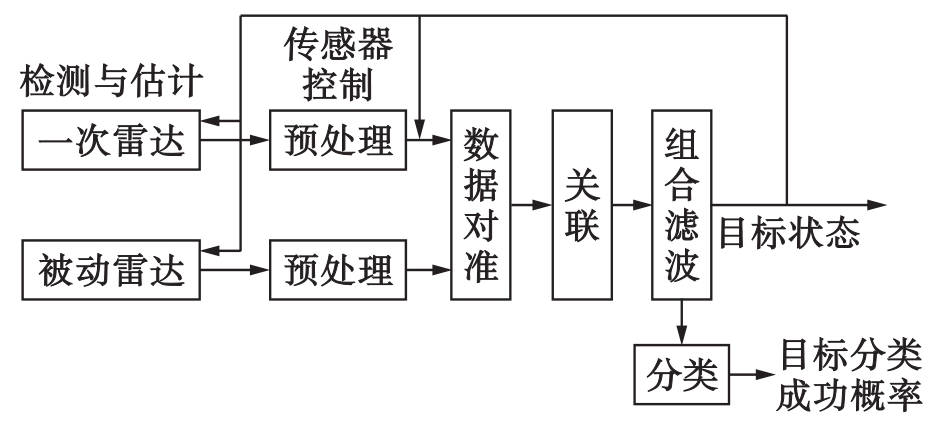
图1 集中式融合示意图
Fig.1 Schematic centralized fusion
本文研究的低空监视采用异类传感器集中式融合,综合利用一次雷达和无源雷达的探测信息,二者互补,能够有效识别低空合作式目标和非合作式目标,给出目标位置的精确估计,更有效地支持保障低空空域安全和地面目标安全.
2.1 目标模型建立
根据目标的运动状态,可以建立不同的目标模型,主要有 CV模型、CA模型、Singer模型和机动目标“当前”模型.本文目标采用CA模型 [11],即将目标的运动看作是匀加速直线运动,建立的目标状态方程和观测方程如下:
1)目标状态方程为
式中:X(k)=[x(k)
![]()
![]()
为时刻的状态向量;
![]()
![]() 分别为笛卡尔坐标系下目标相对于雷达在各个坐标轴上的位置、速度和加速度;
分别为笛卡尔坐标系下目标相对于雷达在各个坐标轴上的位置、速度和加速度;
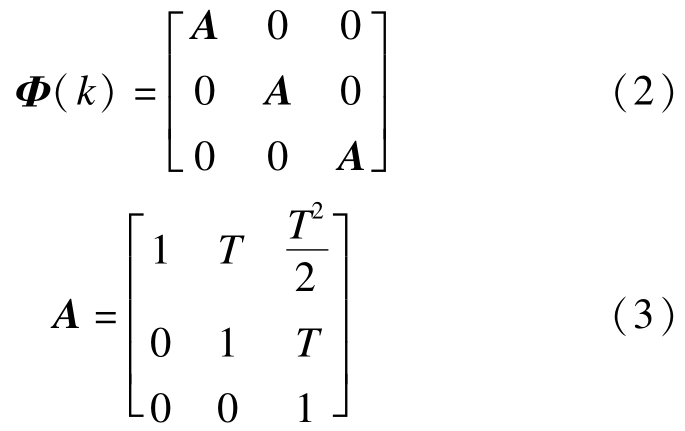
其中,T为雷达探测周期.
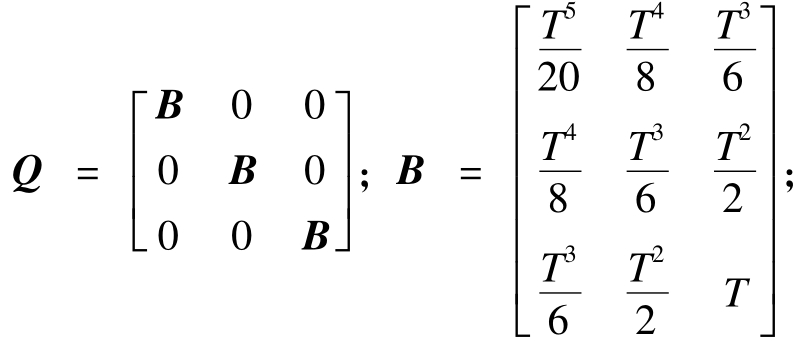
目标过程噪声W(k)满足
式中:
![]()
2)一次雷达观测方程为

式中
 V
a(k)为一次雷达的观测噪声;r,θ,φ分别为一次雷达和目标之间的距离、方位角和俯仰角.
V
a(k)为一次雷达的观测噪声;r,θ,φ分别为一次雷达和目标之间的距离、方位角和俯仰角.
3)无源雷达观测方程为
式中
 V
p(k)为无源雷达的观测噪声.
V
p(k)为无源雷达的观测噪声.
2.2 MSPDAF算法
多传感器概率数据关联算法(MSPDAF)是从概率数据关联算法发展而来的,在杂波环境下对目标有很好的跟踪特性.概率数据关联的思想认为,只要是有效回波,就都有可能源于目标,但是每个回波源于目标的概率有所不同 [12].回波可能来源于目标,也可能源于其他电磁干扰,应用概率进行目标状态估计,能尽可能剥离其他信号的干扰.而低空空域的特性之一正是电磁干扰严重,因而该算法对于低空空域监视的信息融合具有良好的适用性.
在第1次到第k次扫描获得的有效回波全部已知的情况下,第i(i=1,2,…,m k)个回波均为正确回波的概率称之为正确关联概率,用β i(k)来表示,即
式中:γ i(k)为第k次扫描时的1到m k个回波均为正确回波的事件;Z k为第1次到第k次扫描所获得的全部有效回波的集合.
根据全概率公式可以证明,目标在 k时刻的状态估计为均方意义下的最优估计,即
式中:
![]() 为有效回波皆来自目标条件下的目标状态估计值;
为有效回波皆来自目标条件下的目标状态估计值;
 0(k/k)为有效回波皆来自干扰或杂波情况下的目标状态估计值.
0(k/k)为有效回波皆来自干扰或杂波情况下的目标状态估计值.
假定两种雷达同步工作,采用集中式融合方式,状态模型采用式(1),一次雷达和无源雷达观测模型分别采用式(2)、(3)和式(4)、(5).两种雷达的观测噪声 V a(k)、V p(k)均为零均值高斯白噪声,且满足
式中,R i(k)为传感器观测误差协方差矩阵.
设
![]() 表示第n个传感器在 k时刻确认的量测集合
表示第n个传感器在 k时刻确认的量测集合
![]() 表示到 k时刻的累计量测集合,则目标状态的第n个传感器的最小方差估计为
表示到 k时刻的累计量测集合,则目标状态的第n个传感器的最小方差估计为

目标状态的估计为
式中
![]() 为联合概率密度函数.
为联合概率密度函数.
对于一次雷达,利用航迹库中已知的
(k-1/k-1)和其协方差 P(k-1/k-1),分别用式(14)~(17)计算预测状态
(k/k-1)、协方差P(k/k-1)、一次雷达的预测量和新息协方差,即
利用式(16)和(17)所求的
 a(k/k-1)、S
a(k)判断一次雷达的观测是否落在跟踪波门内,即
a(k/k-1)、S
a(k)判断一次雷达的观测是否落在跟踪波门内,即
式中,g a为一次雷达椭球关联门常数.
根据式(13)利用关联门内的观测对一次雷达进行状态估计,得到
a(k/k)和协方差阵 P
a(k/k)分别为
式中:
a
j(k/k)为在量测 Z
a
j(k)源于目标条件下的更新状态估计;β
a
j(k)为k时刻第j个量测是来自目标的概率.
式中,
 a(k)为观测落入一次雷达跟踪波门内的概率.
a(k)为观测落入一次雷达跟踪波门内的概率.
利用式(19)和(20)所求的
a(k/k)、P
a(k/k)求得无源雷达的预测、新息协方差分别为
利用式(21)和(22)所求的
p(k)、S
p(k)判断无源雷达的观测是否落在跟踪波门内,即
式中,g p为无源雷达椭球关联门常数.
根据式(13)利用关联门内的观测对无源雷达观测进行状态估计,得到
p(k/k)和协方差阵P
p(k/k),即
利用一次雷达和无源雷达的量测信息可求得对目标的状态估计,即
以某一低空航空器为目标,其初始位置为(10 000m,9000m,1000m),初始速度为(-200m/s,-60 m/s,-2 m/s),加速度大小为(-2 m/s 2,-3m/s 2,-1m/s 2).一次雷达、无源雷达的采样周期均为T=1 s,噪声均为零均值高斯白噪声.一次雷达测距误差标准为100 m、测量角度标准差为0.006 rad,无源雷达测量角度标准差为0.004 rad,二者椭球门关联常数均为g=4.采用一次雷达量测和MSPDAF数据融合算法进行MATLAB仿真,得到目标的位置、速度和加速度均方根误差(RMSE)分别如图2~4所示.仿真结果表明,MSPDAF算法将一次雷达与无源雷达进行数据融合,跟踪效果比单一的一次雷达的跟踪测量效果更精确,更加贴合理想位置.
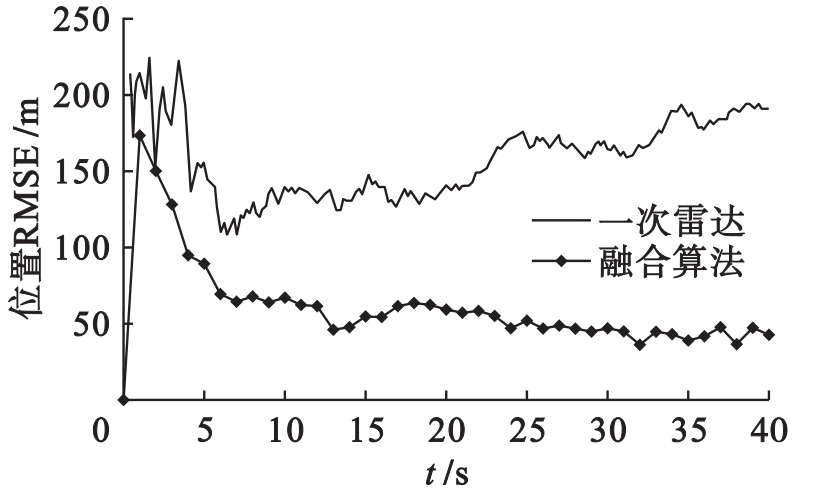
图2 位置误差
Fig.2 Position errors
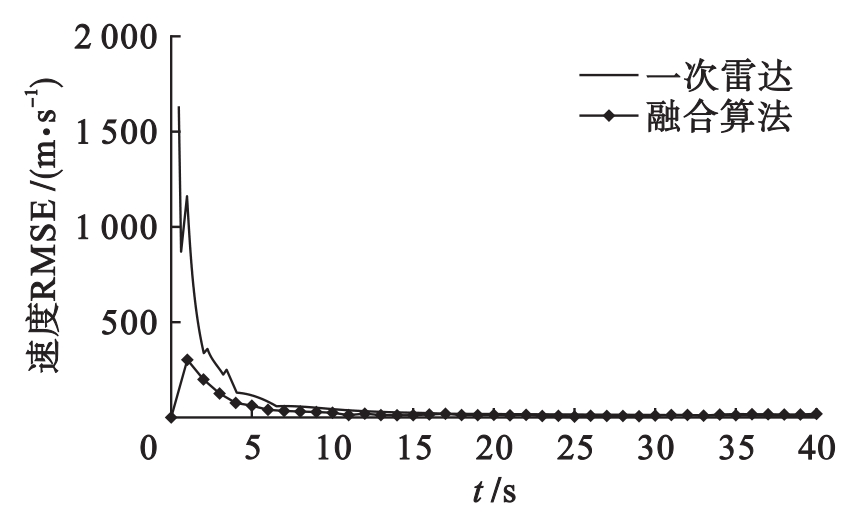
图3 速度误差
Fig.3 Velocity errors
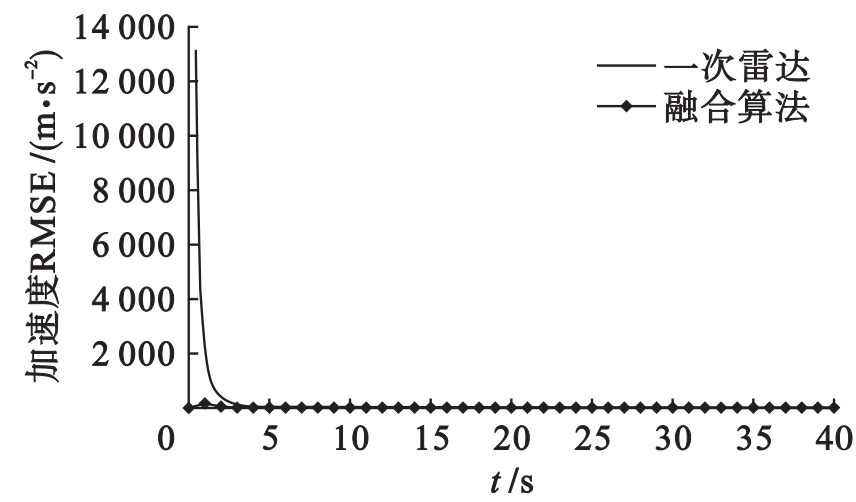
图4 加速度误差
Fig.4 Acceleration errors
将目标初始位置设定为(40 000m,36 000m,1 000m),保持其他指标不变,得到目标的位置、速度和加速度均方根误差分别如图5~7所示.仿真结果表明,随着雷达与目标的距离变远,虽然MSPDAF算法和一次雷达的跟踪测量精确度都比距离较近时有所下降,但MSPDAF算法仍比一次雷达具有更好的跟踪效果.
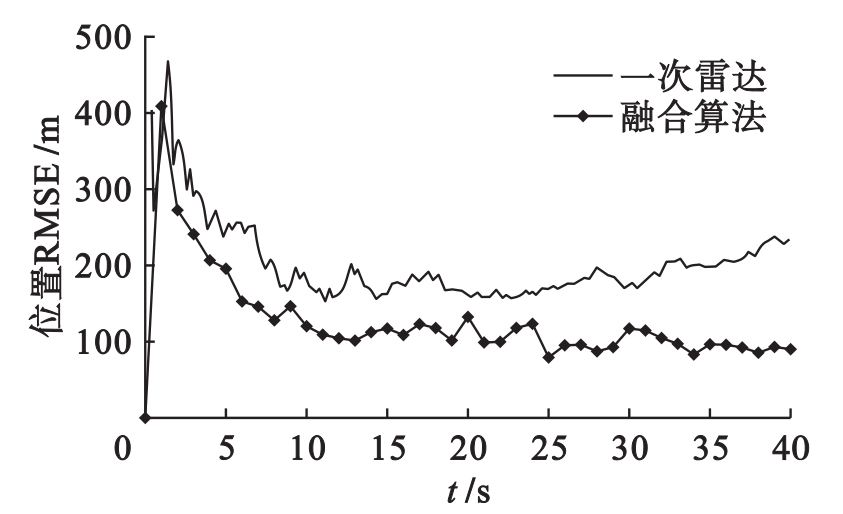
图5 远距离条件下的位置误差
Fig.5 Position errors under long distance condition
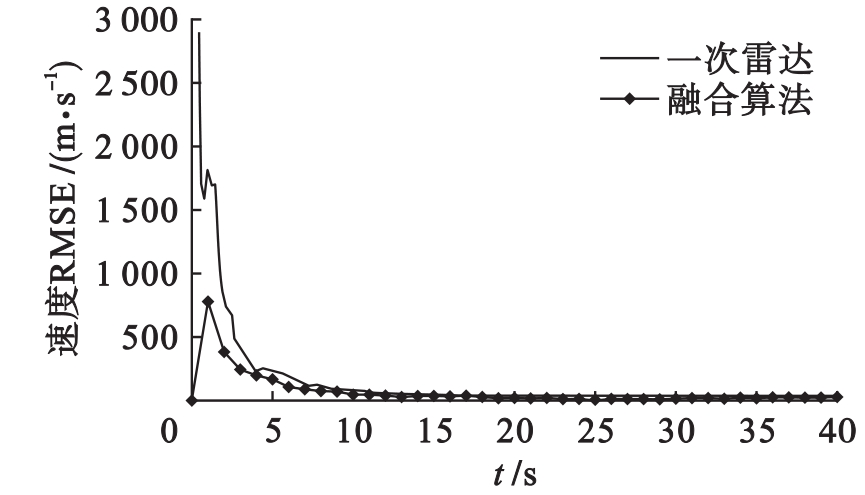
图6 远距离条件下的速度误差
Fig.6 Velocity errors under long distance condition
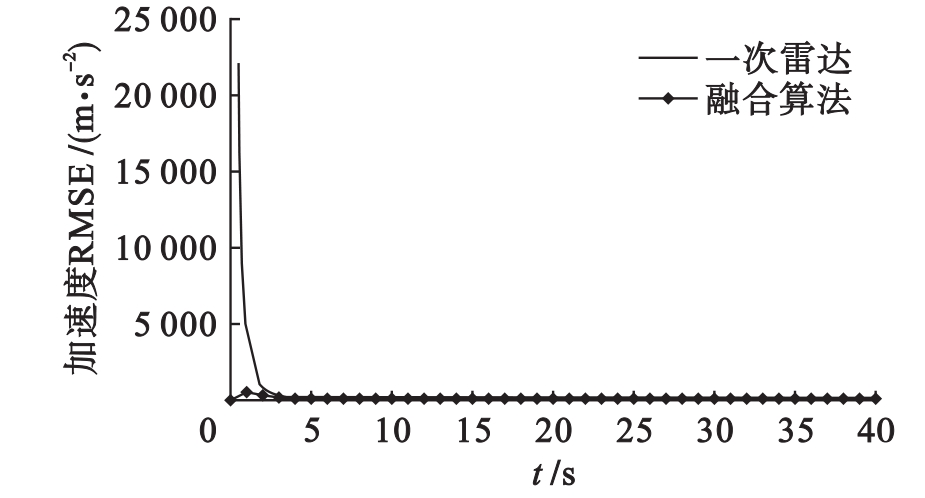
图7 远距离条件下的加速度误差
Fig.7 Acceleration errors under long distance condition
保持各项指标与第一组实验相同,在空域内加入服从泊松分布的杂波,杂波密度为10 -7个/m 3,得到目标的位置、速度和加速度均方根误差如图8~10所示.仿真结果表明,在干扰条件下,MSPDAF算法和一次雷达的跟踪测量精确度都较无干扰时有所下降,但MSPDAF算法仍比一次雷达具有更好的跟踪效果.
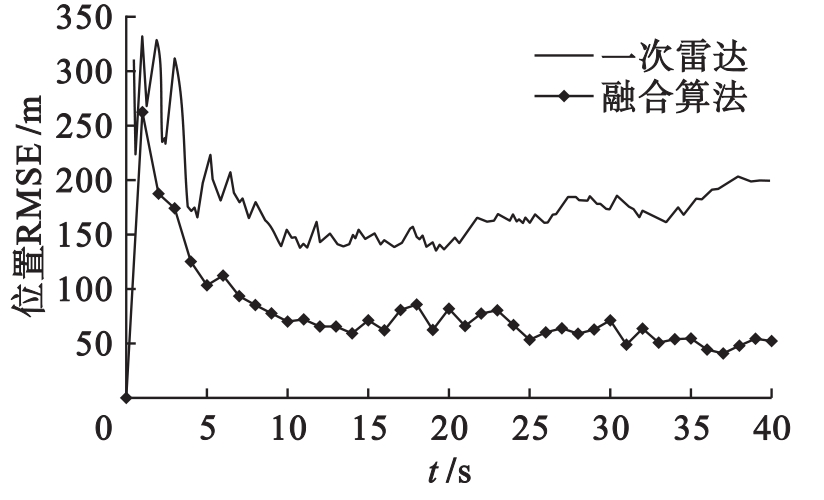
图8 杂波条件下的位置误差
Fig.8 Position errors under clutter condition
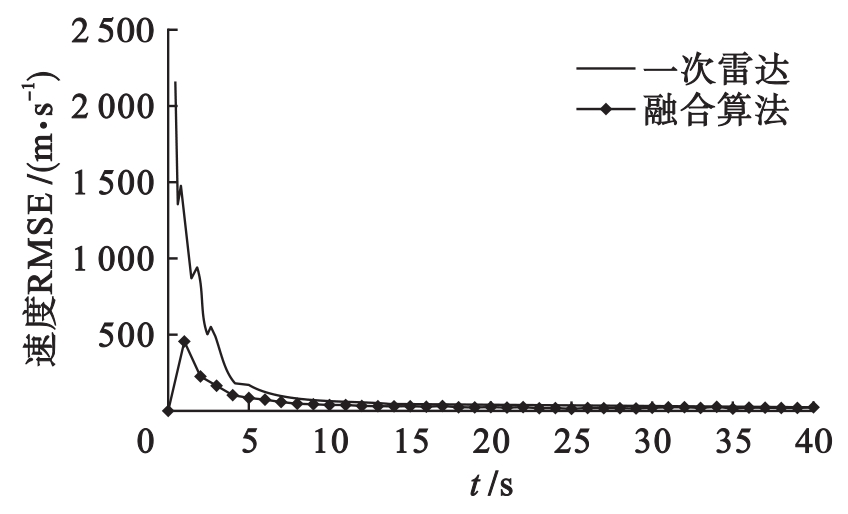
图9 杂波条件下的速度误差
Fig.9 Velocity errors under clutter condition
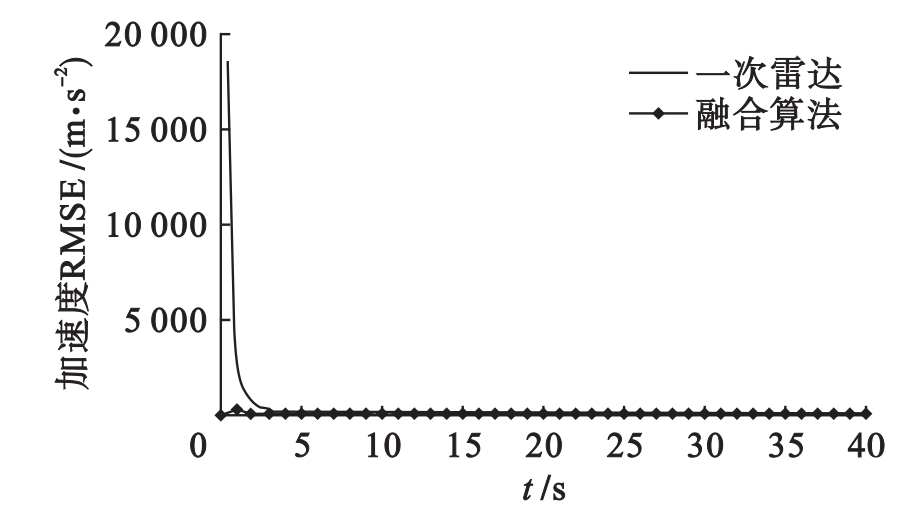
图10 杂波条件下的加速度误差
Fig.10 Acceleration errors under clutter condition
本文针对一次雷达和无源雷达协同监视的特点,假设目标的运动均为加速直线运动,噪声均为高斯白噪声,研究了基于MSPDAF算法的信息融合方法.仿真结果证明所提出方法具有较高的跟踪精度和抗干扰性,因而更利于电磁环境复杂的低空空域的目标跟踪.本文提出融合算法能够为低空空域航空器的监视提供借鉴,从而更好地保障低空空域运行安全.
参考文献:(
References:):
[1]杨明,郑金华,胡耀坤.低空空域现状分析与空管监视系统设计[J].科技传播,2015(10):159-160.(YANG Ming,ZHENG Jin-hua,HU Yao-kun.Situation analysis of low altitude airspace and design of ATC surveillance[J].Public Communication of Science and Technology,2015(10):159-160.)
[2]李邢超.空管新技术在低空空域管理中应用分析[J].电子测试,2015(12):126-127.(LI Xing-chao.Application and analysis of new air traffic control technology in low altitude airspace management[J].Electronic Test,2015(12):126-127.)
[3]刘璇.基于无源雷达的动目标回波仿真与定位研究[D].大连:大连理工大学,2013.(LIU Xuan.The study on the moving target echo simulation and localization in passive radar system[D].Dalian:Dalian University of Technology,2013.)
[4]杨荣盛.低空空域监视对策研究[D].广汉:中国民用航空飞行学院,2011.(YANG Rong-sheng.The research of low altitude airspace surveillance strategy[D].Guanghan:Civil Aviation Flight University of China,2011.)
[5]陈唯实,宁焕生.利用一次雷达实现低空空域的安全监视[J].北京航空航天大学学报,2012,38(2):143-148.(CHEN Wei-shi,NING Huan-sheng.Security surveillance of low altitude airspace with primary radar[J]. Journal of Beijing University of Aeronautics and Astronautics,2012,38(2):143-148.)
[6]许旭,李忱,张越,等.X波段低空监视一次雷达技术研究[J].微波学报,2014(6):594-597.(XU Xu,LI Chen,ZHANG Yue,et al.A study of low-altitude surveillance radar technology[J].Journal of Microwaves,2014(6):594-597.)
[7]Beker JC.Sensor and navigation data fusion for an autonomous vehicle[C]//Proceedings of the IEEE Intelligent Vehicles Symposium.Michigan,USA,2000:156-161.
[8]陆增喜,王大力.一种修正测速雷达误差值的设计方法[J].沈阳工业大学学报,2015,37(4):423-427.(LU Zeng-xi,WANG Da-li.A design of correcting error value of velocity radar[J].Journal of Shenyang University of Technology,2015,37(4):423-427.)
[9]何友,彭应宁.多传感器数据融合模型综述[J].清华大学学报(自然科学版),1996,36(9):14-20.(HE You,PENG Ying-ning.Survey of multi sensor data fusion models[J].Journal of Tsinghua University(Natural Science Edition),1996,36(9):14-20.)
[10]王力.基于DS证据理论的多传感器数据融合算法研究与应用[D].太原:太原理工大学,2015.(WANG Li.Research and application of multi-sensor fusion algorithm based on DS evidence theory[D]. Taiyuan:Taiyuan University of Technology,2015.)
[11]杨艳成.基于交互式多模型的机动目标跟踪算法研究[D].哈尔滨:哈尔滨工程大学,2011.(YANG Yan-cheng.Research on maneuvering target tracking algorithm based on interactive multi-model[D].Harbin:Harbin Engineering University,2011.)
[12]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004.(YANGWan-hai.Muiti sensor data fusion and its application[M].Xi’an:Xi’an Electronic Science and Technology University Press,2004.)
(责任编辑:景 勇 英文审校:尹淑英)
Defect detection of veneer based on mathematical morphology and im proved Otsu algorithm
DAITian-hong,GU Xin-cen,LIU Xue-zhe,HU Xue-jing
(College of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040,China)
Abstract:In the classical detection operators,in order to solve the problem that the detect edges are not clear and the pseudo-edge even forms in the defect detection of gray level images of veneer,a defect detection algorithm for veneer in combination with both improved Otsu algorithm and mathematical morphology was proposed.In the HSI color space,the H,S and I components filtered with mathematical morphology were separately dealt with the proposed algorithm,and the detection results of three components were superimposed.The results show that the proposed algorithm can accurately detect one or more defect edges.Compared with the detection results of classical edge detection operators,it is revealed that the proposed algorithm is better than other methods not only in defect positioning but also in edge extraction.
Key words:mathematical morphology;multiple structural element;gray scale image;defect detection;veneer defect;edge extraction;defect positioning;color space
中图分类号:TP 391.9
文献标志码:A
文章编号:1000-1646(2016)06-0674-06
doi:10.7688/j.issn.1000-1646.2016.06.14
收稿日期:2016-04-26.
基金项目:黑龙江省自然科学基金资助项目(C201414).
作者简介:戴天虹(1963-),男,辽宁海城人,教授,博士,主要从事模式识别与计算机控制等方面的研究.
网络出版地址:11-07 12∶30在中国知网优先数字出版.
网络出版地址:http:∥www.cnki.net/kcms/detail/21.1189.T. 20161107.1230.010.htm l