风力发电技术
风力发电系统是十分复杂的非线性系统,对风电机组控制技术的研究主要集中在两个方向:功率控制和载荷控制[1-2].而功率控制研究的热点问题之一就是风电机组的最大功率追踪问题.随着风电机组发展趋势大型化,机组的最大功率点追踪问题也越来越突出.目前,风电机组在额定风速以下的功率追踪方法较多,主要包括功率信号反馈控制、最佳叶尖速比控制等[3-4].
功率信号反馈法基于最大功率曲线实现,该方法基于风电机组的最大功率曲线和机组的转速进行最大功率追踪.但实际上最大功率曲线因风机参数和风机具体的工作环境变化而变化,因此移植性较差.
最佳叶尖速比控制基于实时风速实现最大功率追踪,该方法依赖于风速的准确测量.实际上,风的随机性与波动性使得风速的测量较为困难.风速计安装位置造成了风速测量的较大延迟,风速分布、塔影、湍流等因素也影响了风速测量的精度[5],因此实际应用较少.
针对额定风速下叶尖速比法实现功率追踪对风速的依赖问题,国内外学者做了大量研究.文献[6]将最佳叶尖速比法、爬山法和功率反馈法相结合,提出一种风电机组自适应功率控制方法.该方法改善了机组在急变风速下的风能追踪性能,但计算过程复杂繁琐,且实现较为困难.文献[7]提出采用改进灰色理论来预测风速的方法,该方法将残差修正的灰色理论与爬山法结合进而实现对功率的追踪,但该方法依赖于原始风速.文献[8]提出将模糊粗糙集和神经网络预测相结合的风速预测方法.该方法通过对当前时刻的风速、温度等参数进行下一时刻的风速预测,而初始风速测量的准确度将在一定程度上影响预测风速的精度.文献[9]从电磁转矩的角度出发,基于速度观测器实现了直驱式永磁风电机组最大功率点追踪.该方法思路简单,但预测过程需要设计额外的观测器对发电机的转速加速度进行预测,增加了设计的复杂度,实现较为繁琐.
基于最佳叶尖速比控制,本文提出一种基于风速预测的改进叶尖速比离散模糊控制功率追踪方法.该方法从机组输出电功率的角度出发,结合风电机组输出电功率、风能利用系数搜索当前叶尖速比,再结合发电机转速验证搜索值,进而实现了额定风速以下阶段,风电机组无风速传感器的最佳叶尖速比最大风能追踪.该方法与其他最佳叶尖速比风能追踪方法相比,具有参数依赖少、实现简单、追踪效果好等优点,在追踪效果接近的情况下省去了风速传感器,节省了安装维护成本,仿真结果证明了该方法的有效性.
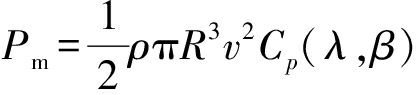
当风以速度v经过风机叶片时,叶轮获取的机械功率为
(1)
式中:ρ为空气密度(取ρ=1.225 kg/m3);R为风轮半径;Cp(λ,β)为风能利用系数,是桨距角β和叶尖速比λ的函数.
风能利用系数的常用近似整定公式有两种,本文采用的工程整定公式[10]为

0.001 84(λ-3)β
(2)
风能利用系数与叶尖速比和桨距角的关系曲线如图1所示.在额定风速以下,一般取β=0.
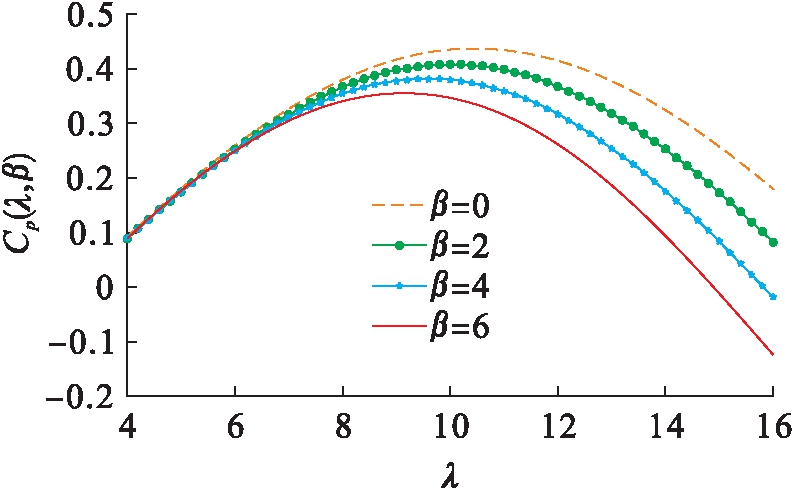
图1 风能利用系数与桨距角关系
Fig.1 Relationship between wind energy utilizationcoefficient and pitch angle
叶尖速比λ计算表达式为
λ=ωR/v
(3)
式中,ω为风轮转速.
在额定风速以下阶段,结合式(1)~(3)可得功率![]() 转速关系式为
转速关系式为
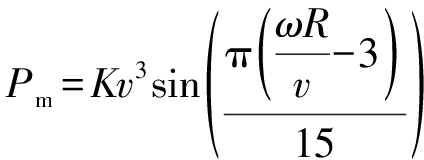
(4)
式中,K为常数,K=ρπR2/2.
不同风速对应的功率![]() 转速曲线如图2所示.连接图2中不同风速下功率
转速曲线如图2所示.连接图2中不同风速下功率![]() 转速曲线的峰值点,可得到对应风速范围内功率
转速曲线的峰值点,可得到对应风速范围内功率![]() 转速特性曲线,最大功率追踪即是控制风电机组的工作点在这条曲线上.
转速特性曲线,最大功率追踪即是控制风电机组的工作点在这条曲线上.
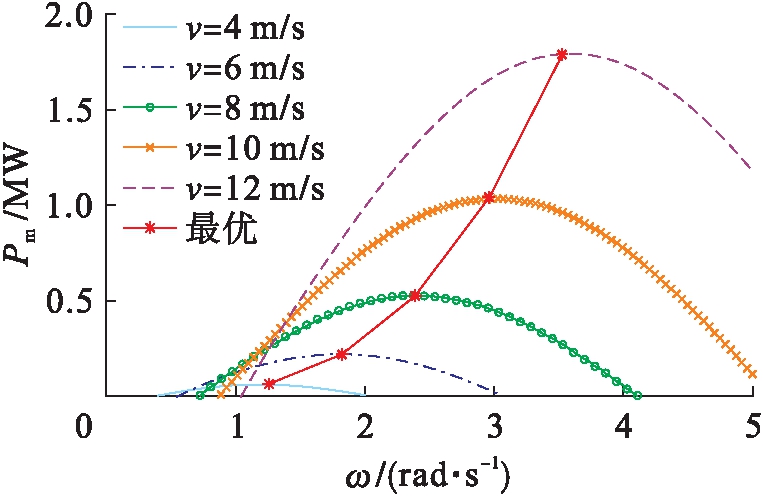
图2 功率![]() 转速关系
转速关系
Fig.2 Power-speed relationship
由双馈异步感应电机的工作原理可知,其电磁转矩表达式[11]为
(5)
式中:p为发电机极对数;m为发电机的相数;U为电网侧电压;c为发电机修正系数;ωg为发电机转速;ω1为发电机的同步转速;r1、x1为定子绕组的电阻和漏抗;r2、x2为转子绕组的电阻和漏抗.
发电机运动方程为
(6)
式中:Tm为风轮的气动转矩;Te为电磁转矩;μe为电机侧阻尼系数;Jg为发电机转动惯量.
最佳叶尖速比法是通过控制实际叶尖速比逼近最佳叶尖速比以实现最大风能追踪的,原理框图如图3所示.
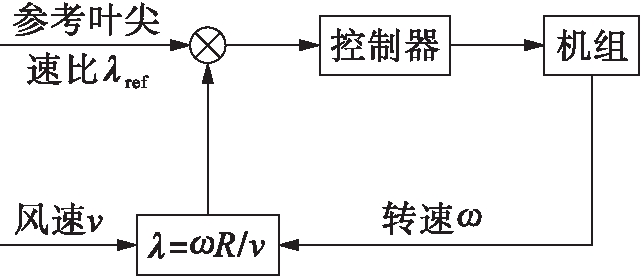
图3 叶尖速比法控制框图
Fig.3 Control diagram of tip speed ratio method
结合式(2)可知,当风能利用系数取最大值时,对应的叶尖速比最优.叶尖速比法即是以最佳叶尖速比值作为参考叶尖速比,通过跟踪最佳叶尖速比间接调整风力发电机转速,实现风电机组的最大功率追踪.
最佳叶尖速比法功率追踪的缺陷之一就是依赖于风速,这使得追踪性能受风速变化的影响较大.同时,风速测量的滞后造成了控制器控制动作滞后,实时性较差.本文从机组输出电功率的角度出发,采用输出电功率进行风速预估改进叶尖速控制来避免风速测量对控制系统的影响.改进叶尖速比法控制框图如图4所示.
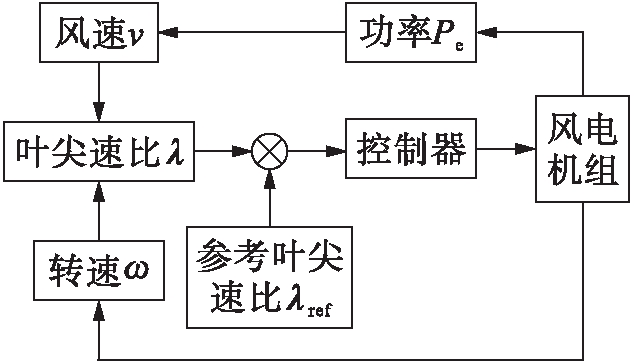
图4 改进叶尖速比法控制框图
Fig.4 Control diagram of improved tip speed ratio method
由式(1)可知,在输出功率Pe和风能利用系数Cp已知的情况下,可解出对应于当前输出功率的风速v,同时考虑到传动损耗K1和能量转换效率η,可得到风速关系式为
(7)
结合式(3)、(4)、(7)可知,当叶尖速比λ确定时,风速v即可唯一确定.为此,本文采用搜索匹配验证的方法来确定叶尖速比.
在风轮转速已知的情况下,给定一个风速值可解得一个叶尖速比值,进一步可解出风能利用系数值.这里给出叶尖速比的取值范围为D,以定步长遍历D范围内的叶尖速比λr,结合式(3)、(4)、(7)解出风速v,再求出对应于该风速值的叶尖速比λt,如λr=λt,则说明解出的风速值vt与实际风速值vr是吻合的,以预估风速vt作为当前时刻的实际风速驱动风电机组运行.
风力发电系统是一种非线性、强耦合的复杂系统.传统线性控制器依赖于实际模型,对系统的参数要求较高,一旦风机参数发生变化,则需要重新设计控制器.而模糊控制对模型依赖较弱,对系统参数要求不高,只需要制定合适的模糊规则即可实现较为理想的控制效果,适合复杂系统的控制.因此,本文采用离散模糊控制器作为机组的功率控制器.
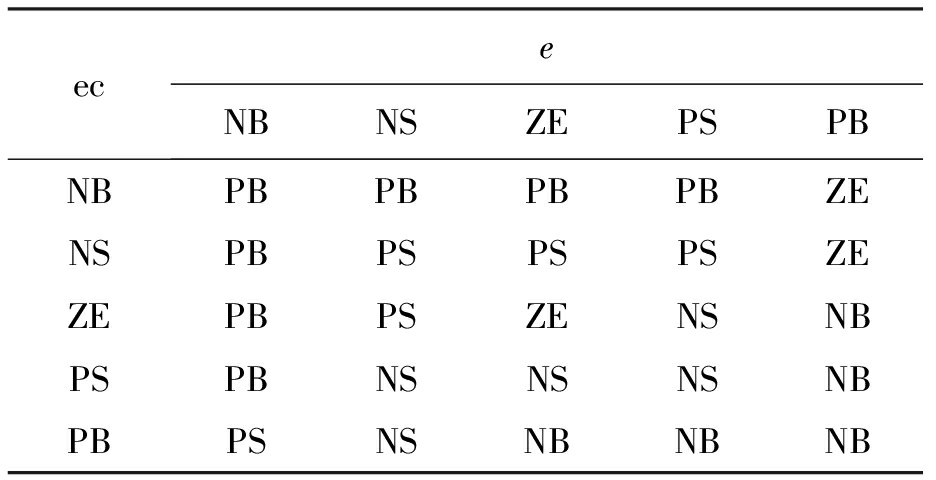
离散模糊控制器采用二维控制结构,以叶尖速比误差e和误差变化率ec为输入,以定子侧调整电压u为输出.其中,误差e∈(-4,4),误差变化率ec∈(-100,100),对输入变量进行尺度变换使得e,ec∈(-3,3),e和ec的语言值均取{负大,负小,零,正小,正大}.模糊控制规则如表1所示.
表1 离散模糊控制规则
Tab.1 Discrete fuzzy control rule
eceNBNSZEPSPBNBPBPBPBPBZENSPBPSPSPSZEZEPBPSZENSNBPSPBNSNSNSNBPBPSNSNBNBNB
本文采用MATLAB仿真软件对双馈风力发电机进行仿真分析,仿真参数设置为:额定功率1.5 MW,风轮半径40.5 m,传动比为75.76,发电机同步转速1 500 r/min,发电机转动惯量92.5 kg/m3,风轮转动惯量3 275 300 kg/m3,传动损耗0.72%,发电机额定效率95.3%.
本文采用三种风速模型来模拟实际风进行仿真,3种风速模型的参数为:
1) 风模型A.基本风速7.5 m/s,波动范围7~8 m/s,阵风时间4~8.5 s,阵风最大风速9.75 m/s.
2) 风模型B.起始风速7.5 m/s,在50 s时风速阶跃到10.5 m/s.
3) 风模型C.基本风速7.5 m/s,0~27 s是幅值为9.5 m/s,频率为0.1 Hz的正弦风;28~60 s是幅值为8.5 m/s,频率为0.4 Hz的正弦风;61~100 s是幅值为10 m/s,频率为0.1 Hz的正弦风.
在Matlab/Simulink下建立以上3种风速模型,仿真曲线如图5所示.
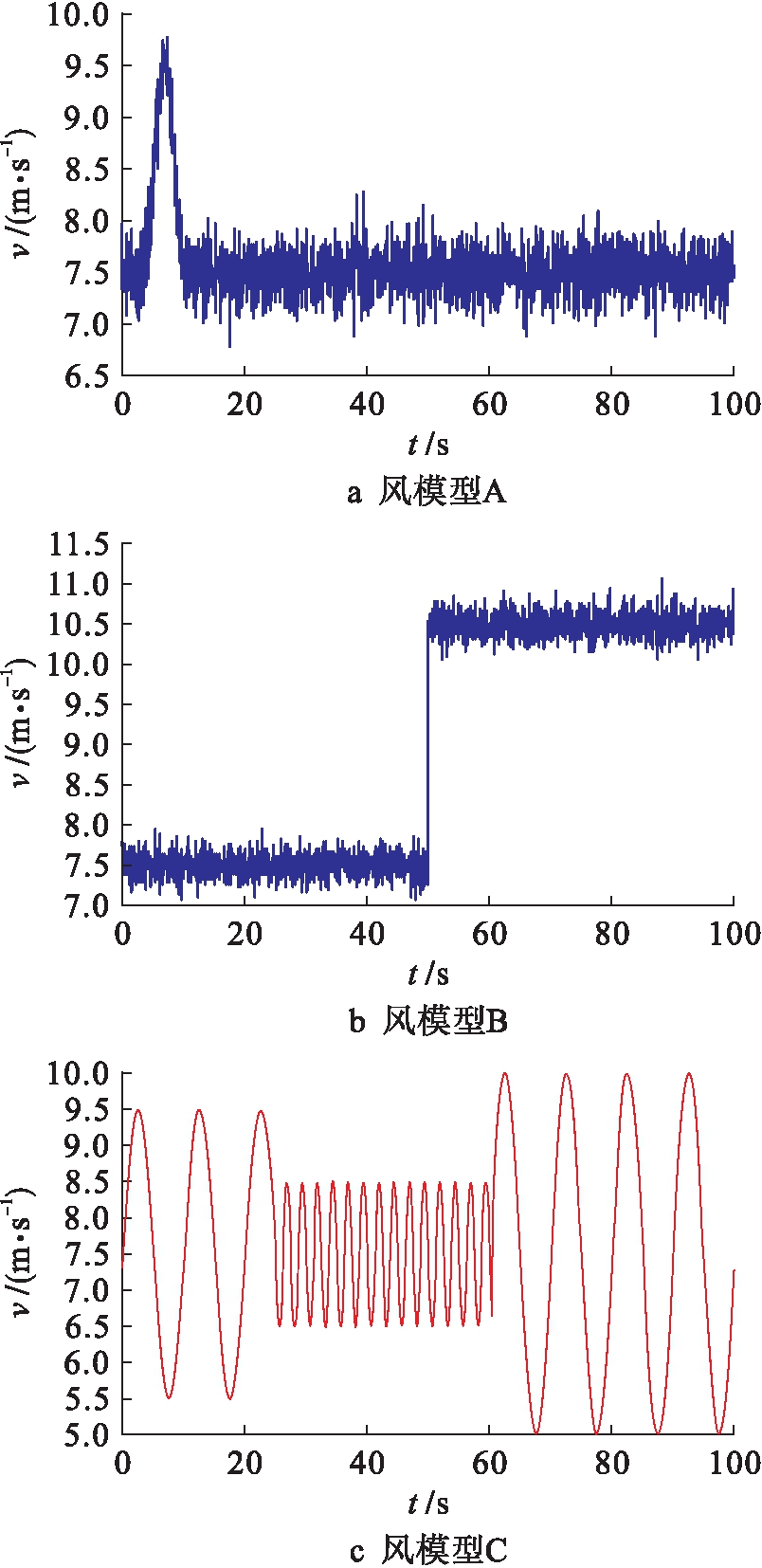
图5 风速仿真曲线
Fig.5 Wind speed simulation curve
3种风速模型下,预估风速与实际风速的对比曲线如图6所示.在风模型A下,稳定时预估风速与实际风速误差在0.18 m/s左右,且预估风速较实际风速平滑;在风模型B下,预估风速能较快地追踪实际风速的变化,体现出较好的实时性;在风模型C下,预估风速也具有较好的跟踪效果,一定程度上说明了该预测方法的鲁棒性.
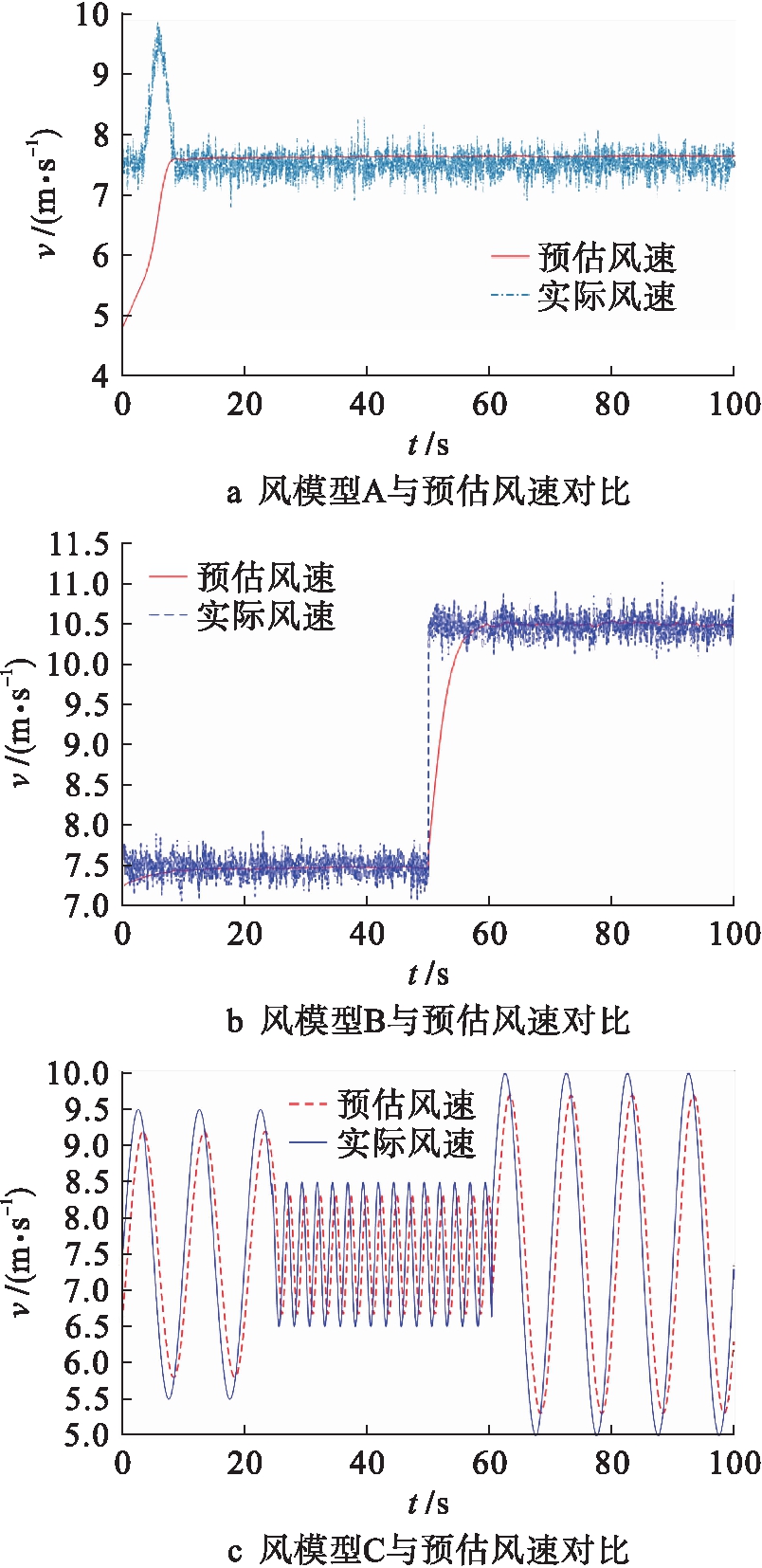
图6 预估风速与实际风速对比
Fig.6 Comparison between predictedand actual wind speed
图7为3种风模型下,传统叶尖速比法与改进叶尖速比法得到的风电机组输出电功率对比曲线.由图7可知,3种风模型下,改进叶尖速比法得到的机组输出电功率可较好地跟踪实际风速下机组输出电功率,风速稳定时,与机组的输出电功率曲线基本吻合.
机组输出电功率的误差曲线如图8所示.在风速突变瞬间,输出功率的误差较大,最大值约在120 kW.在风速稳定时,输出电功率的误差也逐渐稳定在较小的范围.对于变频变速正弦风,机组输出电功率误差稍大,且随风速变化而变化,但在控制器的作用下,输出电功率误差控制在了60 kW以内,说明该方法具有一定的鲁棒性.
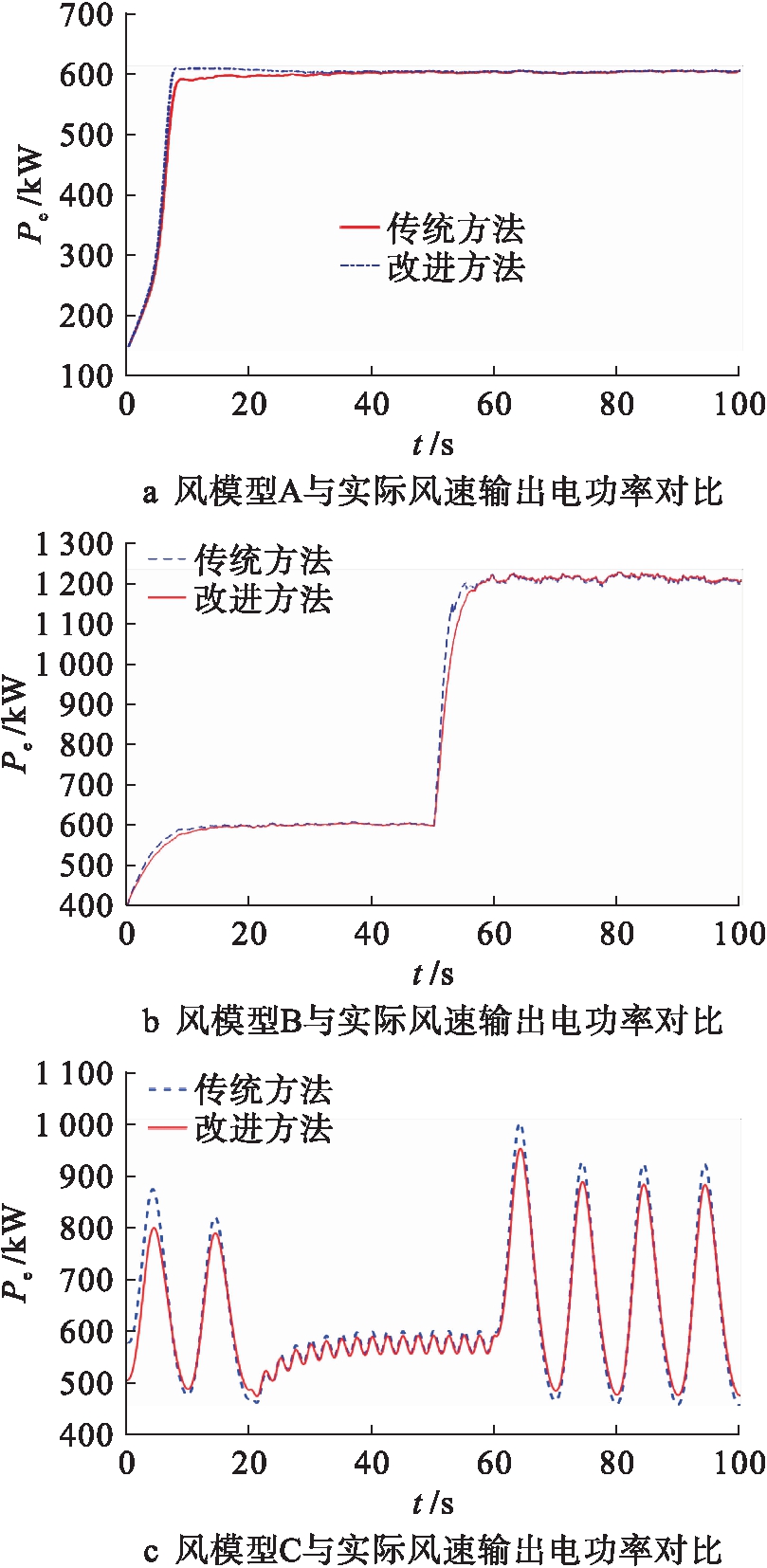
图7 电功率对比
Fig.7 Comparison in electric power
本文基于风速预测,采用改进叶尖速比的方法对机组额定风速下的最大功率点进行追踪控制.通过功率特性公式解得当前输出功率下的预测风速,并结合变步长反推搜索验证预测风速.仿真结果表明,本文提出的功率追踪方法能准确地预测风速并控制机组输出电功率误差.实际上,该方法将风力机当成大型的风速计来进行风速的预测,在机组的风能追踪速度和功率稳定性基本一致的情况下减少了风速传感器数量,在一定程度上降低了成本和系统的复杂性.
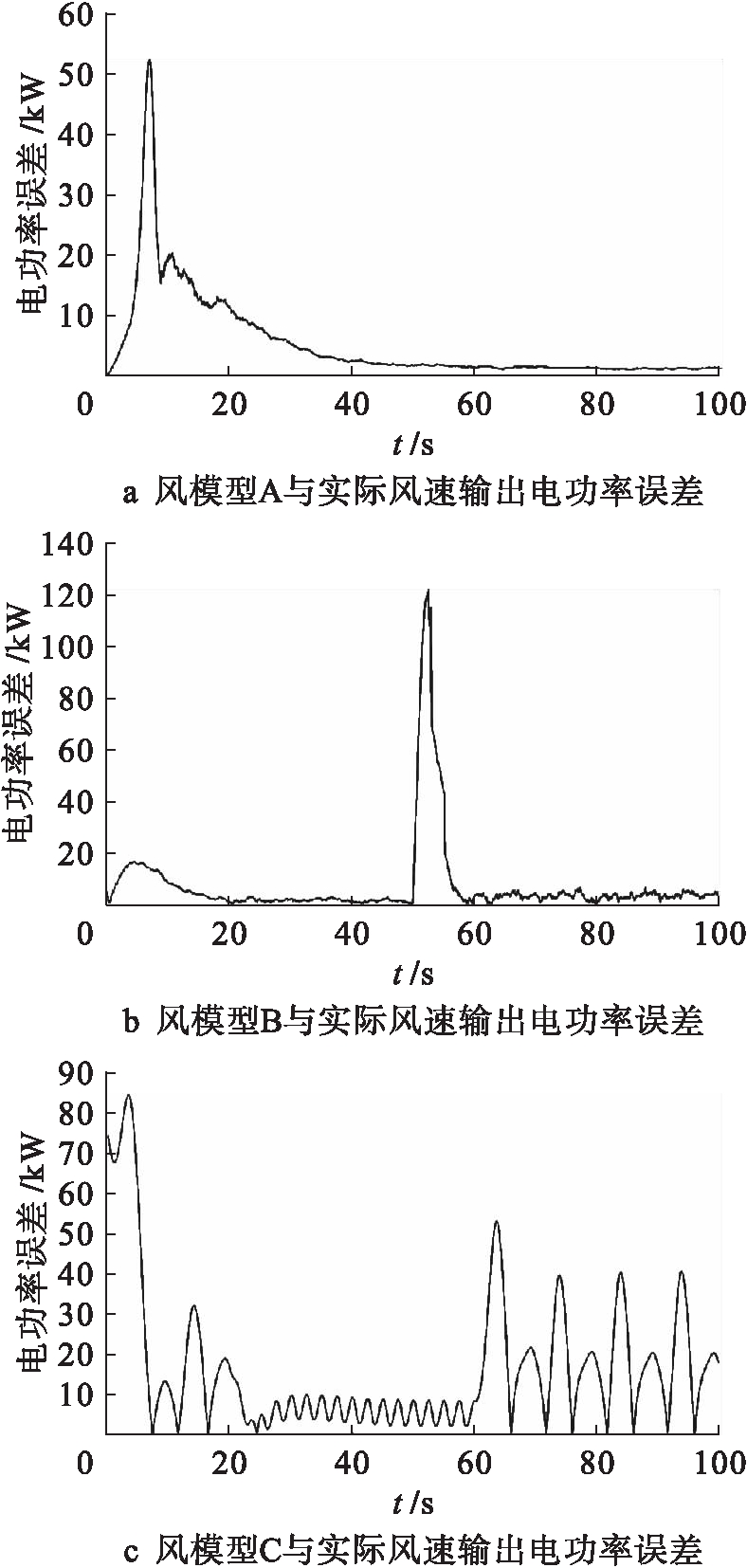
图8 电功率误差曲线
Fig.8 Electric power error curve
[1]王湘明,任树平.风电机组Ⅱ区功率与叶片气动载荷协同控制 [J].沈阳工业大学学报,2017,39(1):6-11.
(WANG Xiang-ming,REN Shu-ping.Cooperative control for II district power of wind turbine and aerodynamic load of blades [J].Journal of Shenyang University of Technology,2017,39(1):6-11.)
[2]王湘明,杨景帅,李南.风电机组气动载荷控制策略 [J].沈阳工业大学学,2017,39(6):617-621.
(WANG Xiang-ming,YANG Jing-shuai,LI Nan.Control strategy of aerodynamic load for wind turbine [J].Journal of Shenyang University of Technology,2017,39(6):617-621.)
[3]刘丹,李强,冯承超.小型直驱式永磁同步风力发电机快速最大功率追踪仿真研究 [J].电力系统保护与控制,2016,44(5):141-145.
(LIU Dan,LI Qiang,FENG Cheng-chao.A simulation study of small direct drive type permanent magnet synchronous generator fast maximum power tracking [J].Power System Protection and Control,2016,44(5):141-145.)
[4]张凤,阎秀恪,兰宏光,等.基于滑膜控制的风机最大风能追踪 [J].沈阳工业大学学报,2014,36(6):625-630.
(ZHANG Feng,YAN Xiu-ke,LAN Hong-guang,et al.Maximum power point tracking of wind turbine based on sliding mode control [J].Journal of Shen-yang University of Technology,2014,36(6):625-630.)
[5]李咸善,徐浩,杜于龙.采用叶尖速比法和爬山搜索法相结合的风力发电系统最大功率点跟踪研究 [J].电力系统保护与控制,2015,43(13):66-71.
(LI Xian-shan,XU Hao,DU Yu-long.Maximum power tracking of wind power generation system using the combination of tip speed ratio method and climbing search method [J].Power System Protection and Control,2015,43(13):66-71.)
[6]Hussain J,Mishra M K.Adaptive maximum power point tracking control algorithm for wind energy conversion systems [J].IEEE Transactions on Energy Conversion,2016,31(2):697-705.
[7]郭鹏.残差灰色风速预测最大风能追踪策略研究 [J].太阳能学报,2011,32(4):548-552.
(GUO Peng.A new MPPT strategy based on residual error gray wind speed prediction [J].Acta Energiae Solaris Sinica,2011,32(4):548-552.)
[8]姚万业,贾昭鑫,黄璞.基于风速预测的改进爬山法最大功率追踪策略 [J].电力科学与工程,2018,34(2):44-49.
(YAO Wan-ye,JIA Zhao-xin,HUANG Pu.Improved MPPT strategy for climbing method based on wind speed prediction [J].Electric Power Science and Engineering,2018,34(2):44-49.)
[9]李亚强.无速度传感器的风电机组最大功率跟踪方法研究 [D].重庆:重庆大学,2015:33-48.
(LI Ya-qiang.Speed sensorless tracking method of maximum power point in wind power generation system [D].Chongqing:Chongqing University,2015:33-48.)
[10]Sappani R,Durairaj R,Mahalingam S,et al.Optimization of power coefficient of wind turbine using genetic algorithm [J].Journal of the Institution of Engineers (India),2017,98(2):111-118.
[11]刘静.大型风力发电机独立变桨距控制系统研究 [D].徐州:中国矿业大学,2014.
(LIU Jing.Research on intelligent control technology of variable speed variable pitch wind power system [D].Xuzhou:China University of Mining and Technology,2014.)